|
Clio
develop
The XRP Ledger API server.
|
|
Clio
develop
The XRP Ledger API server.
|
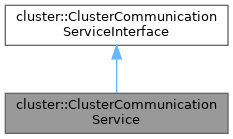
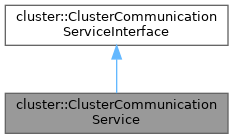
Service to post and read messages to/from the cluster. It uses a backend to communicate with the cluster. More...
#include <ClusterCommunicationService.hpp>
Classes | |
| struct | MakeResult |
| Result of ClusterCommunicationService::make(). More... | |
Public Member Functions | |
| ClusterCommunicationService (std::shared_ptr< data::BackendInterface > backend, std::unique_ptr< etl::WriterStateInterface > writerState, std::unique_ptr< data::LedgerCacheLoadingStateInterface > cacheLoadingState, std::chrono::steady_clock::duration readInterval=kDefaultReadInterval, std::chrono::steady_clock::duration writeInterval=kDefaultWriteInterval) | |
| Construct a new Cluster Communication Service object. | |
| ClusterCommunicationService (ClusterCommunicationService &&)=delete | |
| ClusterCommunicationService (ClusterCommunicationService const &)=delete | |
| ClusterCommunicationService & | operator= (ClusterCommunicationService &&)=delete |
| ClusterCommunicationService & | operator= (ClusterCommunicationService const &)=delete |
| void | run () |
| Start the service. | |
| void | stop () |
| Stop the service. | |
Static Public Member Functions | |
| static MakeResult | make (util::config::ClioConfigDefinition const &config, std::shared_ptr< BackendInterface > backend, std::shared_ptr< etl::SystemState > state) |
| Factory method: construct the service and return a cache loading state for the caller. | |
Static Public Attributes | |
| static constexpr std::chrono::milliseconds | kDefaultReadInterval {1000} |
| static constexpr std::chrono::milliseconds | kDefaultWriteInterval {1000} |
Service to post and read messages to/from the cluster. It uses a backend to communicate with the cluster.
| cluster::ClusterCommunicationService::ClusterCommunicationService | ( | std::shared_ptr< data::BackendInterface > | backend, |
| std::unique_ptr< etl::WriterStateInterface > | writerState, | ||
| std::unique_ptr< data::LedgerCacheLoadingStateInterface > | cacheLoadingState, | ||
| std::chrono::steady_clock::duration | readInterval = kDefaultReadInterval, | ||
| std::chrono::steady_clock::duration | writeInterval = kDefaultWriteInterval ) |
Construct a new Cluster Communication Service object.
| backend | The backend to use for communication. |
| writerState | The state showing whether clio is writing to the database. |
| cacheLoadingState | State controlling cache loading permission for this node. |
| readInterval | The interval to read messages from the cluster. |
| writeInterval | The interval to write messages to the cluster. |
|
static |
Factory method: construct the service and return a cache loading state for the caller.
Reads the cache.limit_load_in_cluster config flag: if true, loading is immediately allowed (single-node mode); if false, the cluster will gate permission via CacheLoaderDecider.
| config | The application configuration |
| backend | The data backend |
| state | The shared ETL system state |